内容:要建立自己的自主机器人,首先,必须要建立自己的机器人模型,URDF(Unified Robot Description Format)模型。 part 3.1 机器人URDF模型机器人URDF模型主要由两个文件组成:.xacro 是主文件,包含URDF项,...
”ROS,URDF, 自主机器人“ 的搜索结果
自建自主机器人,首先建立自己的机器人模型URDF;part 3.1 机器人URDF模型机器人URDF模型主要由两个文件组成:.xacro 是主文件,包含URDF项,包括关节,连杆;同时包含gazebo、rviz的具体信息以便在gazebo和rviz中...
要建立自己的自主机器人,首先,必须要建立自己的机器人模型,URDF(Unified Robot Description Format)模型。 Part 3 建立机器人URDF模型 机器人URDF模型主要由两个文件组成:.xacro 是主文件,包含URDF项,...
本文介绍如何在ROS中使用urdf创建机器人3D模型。机器人的3D模型在ROS中是...它是同ROS通信的渠道,通过机器人的物理尺寸来配置机器人模型,ROS就可以有效的进行自主导航(Navagation)和碰撞检测(collision detect)了。
摆烂才是王道
要建立自己的自主机器人,首先,必须要建立自己的机器人模型,URDF(Unified Robot Description Format)模型。part 3 建立自主机器人URDF模型机器人URDF模型主要由两个文件组成:.xacro 是主文件,包含URDF项,包括...


本发明涉及机器人运动的技术领域,尤其涉及一种基于ROS的机器人室内环境探索、避障和目标跟踪方法。背景技术:随着科学技术的发展及社会的进步,移动机器人技术得到了迅速的发展。目前,机器人的应用已经涉及卫生、...
1.ROS2前世今生2.ROS与ROS2对比3.动手安装ROS24.ROS2初体验。

前面博文已经介绍了机器人平台的机械结构设计、嵌入式硬件平台的搭建等内容,从本片开始介绍本开源机器人平台ROS系统的相关程序,主要有:ROS系统建模;Gazebo仿真;ROS系统机器人SLAM框架;SL...

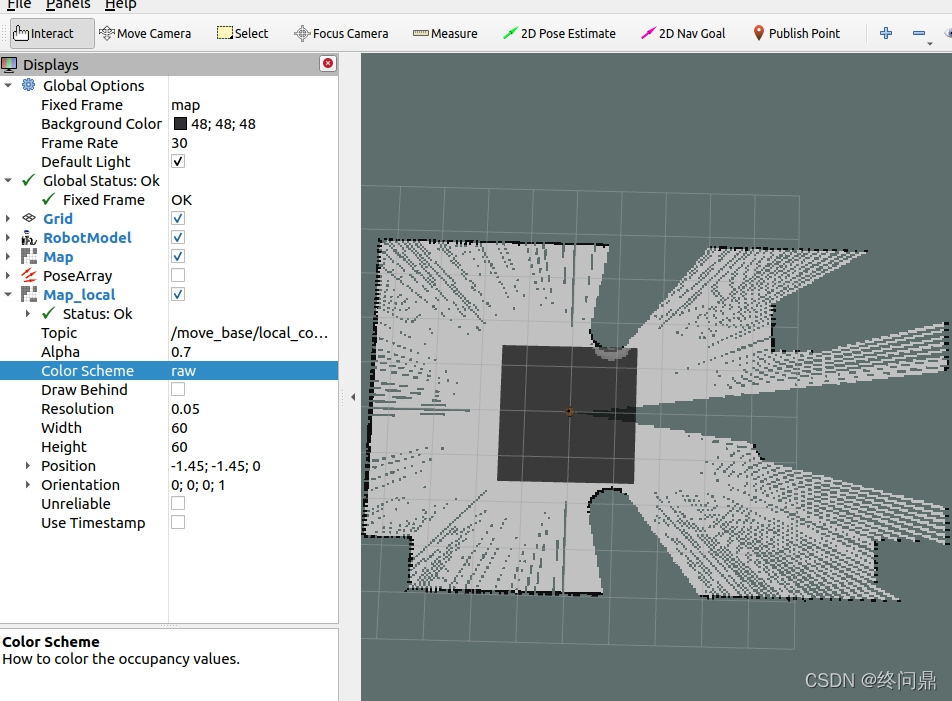
URDF(Unified Robot Description Format)是ROS中描述机器人外形尺寸的一种语言,翻译的名称为“机器人统一描述”。 也就是说在RVIZ中显示一个3D的机器人模型,这个模型具备有一些模块具备TF坐标系关系,告诉系统...


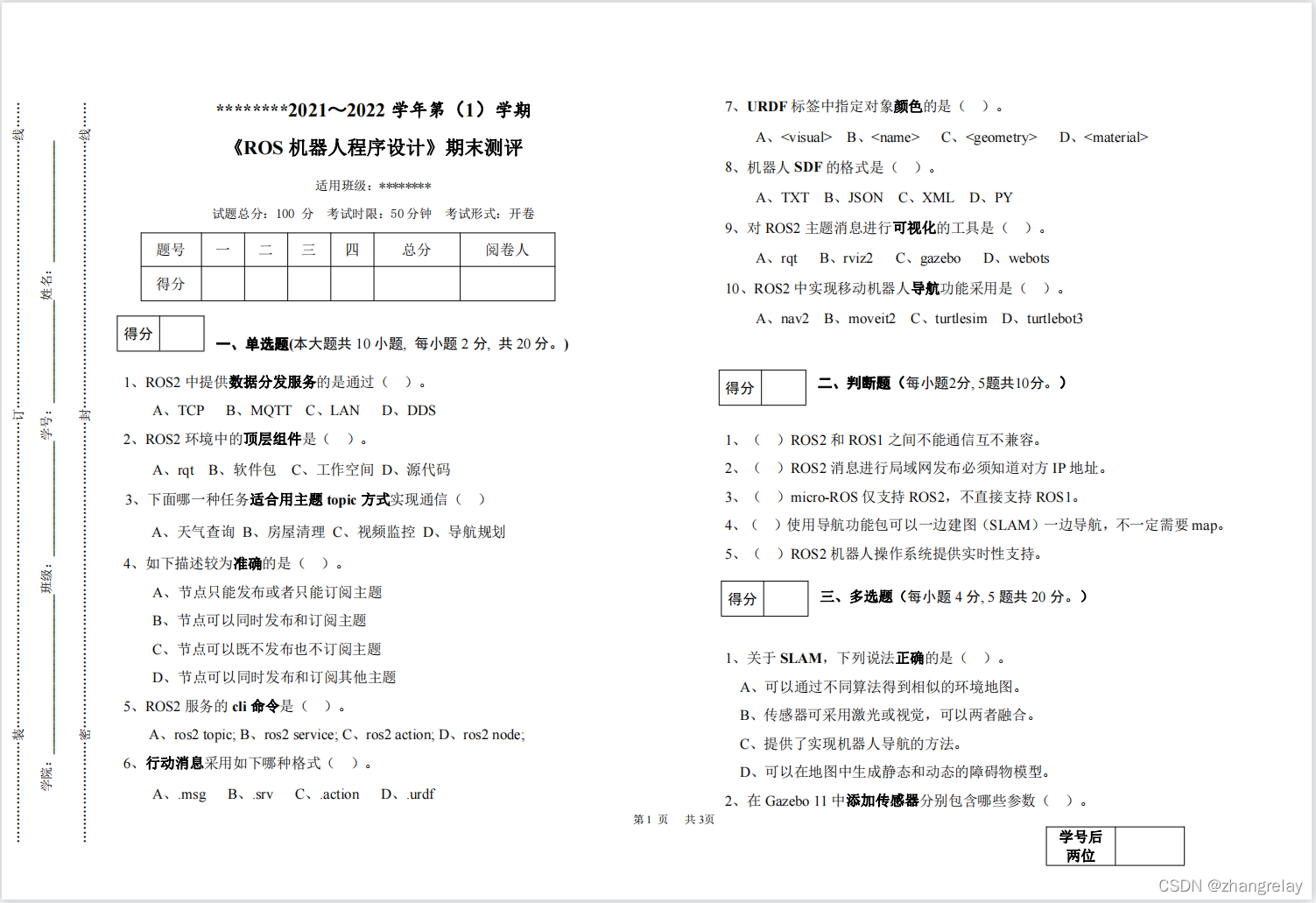
ROS机器人程序设计 ROS robot programming 课程编号 16300021 学分 3 开课学期 7 学时 讲课:32学时 实验:16 学时 实践:0...

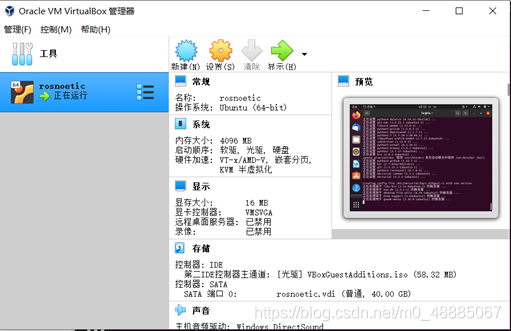
ROS机器人程序设计ROS robot programming本课程包含实际动手操作的示例,帮助学生快速入门开发机器人程序,并提供使用开源ROS1[KINETIC/MELODIC/NOETIC]库和工具的完整解决方案。本课程还介绍如何使用虚拟机和Docker...
内容:要建立自己的自主机器人,首先,必须要建立自己的机器人模型,URDF(Unified Robot Description Format)模型。 part 3.1 机器人URDF模型机器人URDF模型主要由两个文件组成:.xacro 是主文件,包含URDF项,...
要让机器人实现环境感知、机械臂控制、导航规划等一系列功能,就需要操作系统的支持,而ROS就是最重要的软件平台之一,它在科研领域已经有广泛的应用。 不过有关ROS的书籍并不多,国内可供的学习社区就更少了。本
URDF文件是机器人模型描述格式,一个完整的机器人模型是由一系列link和joint组成。 建模过程: 1、创建机器人功能包mbot_description,以及依赖文件urdf和xacro, (1) 创建新文件夹:urdf:存放机器人模型的URDF...
建立自主机器人是很难的,特别是在刚开始的时候. ROS 仿真有助于帮助我们从宏观上对机器人系统进行把握,帮助我们学习如何可以让机器人学会自己去适应环境. 明白机器人从测量和激光数据采集到转变为电机运动的过程. ...
ROS自主建图导航小车项目实践

推荐文章
- 欧拉图和哈密顿图_哈密顿通路度为偶数-程序员宅基地
- Linux下SVN安装配置和使用中遇到的问题-程序员宅基地
- 【算法】设计算法求所有强连通分量的完整代码(kosaraju算法)_kosaraju算法代码-程序员宅基地
- 程序员的自我评价_程序员自我评价-程序员宅基地
- vue的vue-resource和axios介绍_vue-resuorce-程序员宅基地
- MySQL笔记复习(实例 全)_在 goods_name 列上加普通索引-程序员宅基地
- 敏捷软件开发宣言-程序员宅基地
- Android实现通用的ActivityGroup(效果类似Android微博客户端主界面)-程序员宅基地
- git:一、GIT介绍+安装+全局配置+基础操作_请确保本地完成了 git 的全局配置-程序员宅基地
- 文件服务(SMB)共享详解-程序员宅基地